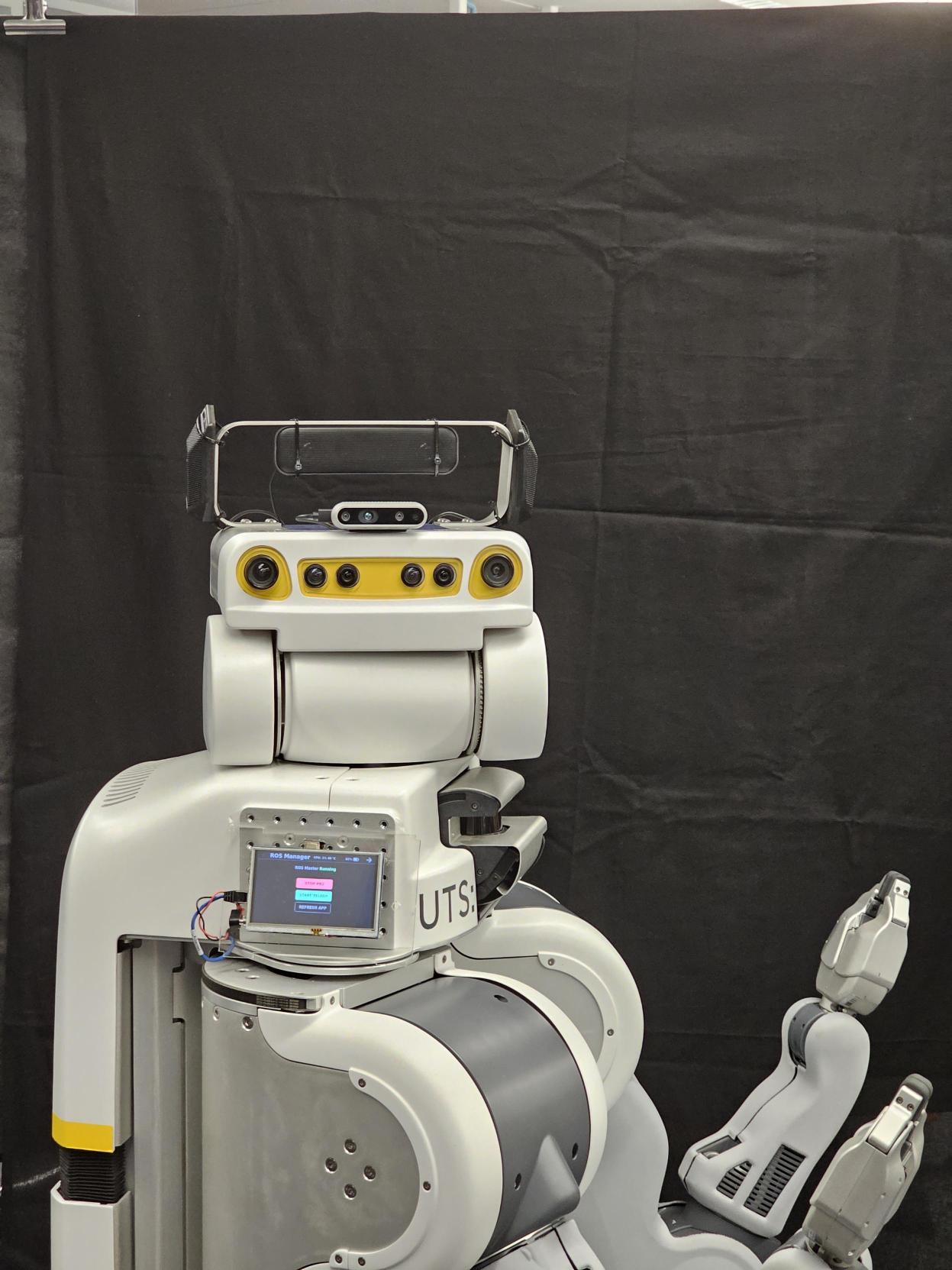
PR2 Upgrade
Successfully enhanced the PR2 robot, a human sized, general purpose robot built on the late 2000s, focusing on improving its software capabilities, sensors and user experience. Upgraded the PR2's existing software packages to be compatible with the latest version of ROS1

Spot Glass
Collaborated on a project at UTS involving Boston Dynamics' Spot robot to navigate environments with transparent obstacles, specifically glass panes common at UTS. Designed and built an array of sensors to detect glass using ultra-sonic spectrum. Developed and integrated a ROS package to access the data from the sensors, enabling Spot users to safely maneuver around glass panes.
Water Pipe Inspection Robot
Joined the water pipe inspection robot project in its final stages, contributing to the refinement and deployment of the technology. Constructed a specialized machine designed to wind coils required for the sensors on board the robot. Engaged in embedded programming to enhance the functionality of the sensors and the overall system reliability. Performed mechanical maintenance, ensuring all components operated at peak efficiency and followed design specifications. Gained substantial knowledge in ROS by developing software modules that improved the robot’s operational capabilities and data processing efficiency.
